>> Top >> Research plan >> Robot and control information processing group
![]()
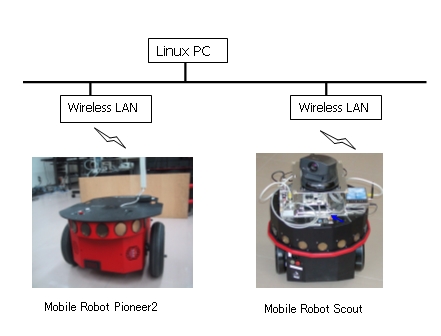
Application of image processing technology to cooperative work between
man and mobile robots
The mobile robot has been used mainly in a factory until now. However mobile
robot is going to come out of a factory and to progress in the direction
which realizes new services such as baggage carrying ,floor cleaning and
patrolling in welfare facility, office, and home. To achieve these services,
three fundamental competences are needed.
1) Self-localization 2) Path planning 3) Human robot interaction
1),2) have been researched until now. So applying image processing technology,
following research themes will be proceeded.
To show robots start and target point by utilizing LED lights and pictures.
To show robots performed tasks by utilizing gesture and pictures.
How to teach the situation to human when robot meets trouble.
We aim at realization of the autonomous mobile robot which supports and coexists
with man.
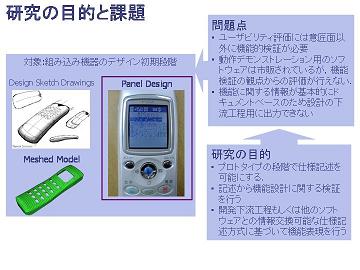
Development of algebraic description method and its implementation for input/output
specification of multimedia instrument
In early design stage of multimedia instrument, most of attention is focused
to body and operation panel design. In these days, RapidPLUS like demonstration
tool is used for prototyping of human interface. However, they are animation
like tool and logical validation is not put into. And, a description method
for product specification is not established. In many case, just "word" document
is used for product specification. In summarize, there is a problem in product
specification method in early design state, logical validation and data reuse
in following firmware development phase.
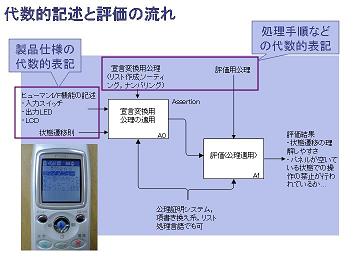
Our subject is to describe a product input/output and state transition specification
in a formal manner and make a validation for stability and easy operation.
For this subject we propose an algebraic description and axiom based validation.
To demonstrate our method, we are going to make a validation of basic property
for finite state transition machine.
>> Vision and image
information processing group
>> Speech and language information processing research group