![]()
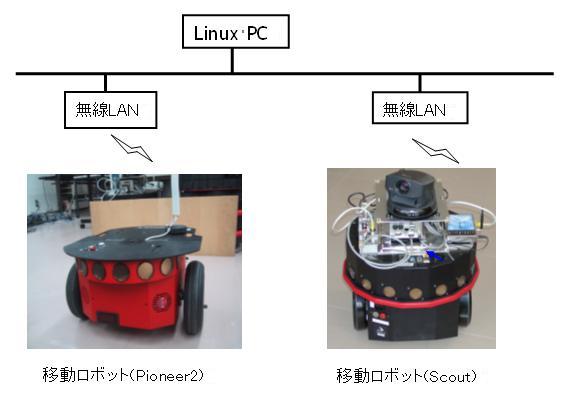
画像情報処理の人間・移動ロボット連携作業への応用
今まで移動ロボットは工場内の生産現場で使用されてきたが、工場を出て、福祉施設、オフィス、家庭など、人間がいる環境で人間の指示に従い、荷物を運搬する、掃除をする、パトロールをするなどの新しいサーピスを実現する方向へ進もうとしている。このような作業をするには、1)ロボットが自己の位置と周囲環境を正確に認識する技術、2)人間を含む障害物を回避しながらゴールヘどのようにして到達するかの計画生成と移動の技術、3)人間と移動ロボット間のコミュニケーション技術が必要となる。従来は1),2)を主として研究してきたが、今後はロボットの視覚センサを活用する3)に関わる
「目印図形や発光ダイオード画像による移動ロボットへの移動目標の提示」
「ジェスチャや説明図による移動ロボットへの作業の指示」
「移動ロボットがトラブルに遭遇した時の人間への周知方法」
に重点を置いて研究を進める。1),2)の成果と組み合わせロボットによる運搬、案内作業サービスへ人間・ロボット連携インタフェースを組み込んだ総合的性能評価を実施し、人間を支援し、人間と共存できる自律移動ロボットの実現を目指す。
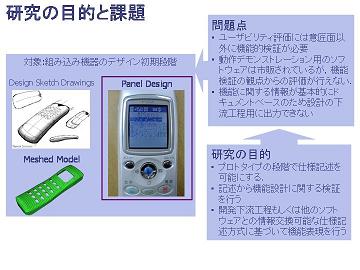
マルチメディア機器入出力仕様の代数的記述方式と実装技術の確立
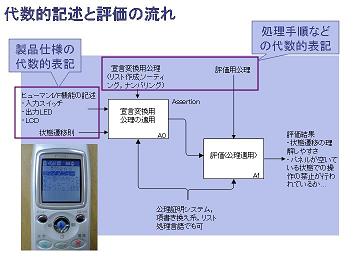
情報機器開発の初期段階では,筐体や操作システムの意匠的なデザインに重点が置かれるが,今日では,RapidPlusなどのヒューマンI/Fの試作ツールを用いたデモンストレーションは行われている.しかし,開発初期段階で機器の設計仕様を表現する技術は確立されておらず,また製品仕様書もWordで書かれた文書がそのまま用いられていることが多い.このように,設計初期段階の仕様記述からの,定性的な検証と下流の開発工程への連携とが行われていない点が問題となっている.
本研究では,設計初期段階におけるシステムの入出力関係や状態遷移規則を形式的に記述し,挙動の安定性や操作性などを分析することを目的とする.このために,代数的な仕様の記述と公理系に基づいた検証方式の提案を行う.また有効性の確認として,提案した方法に基づいて,有限状態機械の基本的な性質の検証を行う.